
谱麦教育
校企合作
教学建设、师资培训、基地建设、科研合作、订单班、就业服务
●校企分工
1、学校提供场地并投资建设 “谱麦机器人测控” 平台软硬件环境、购买运营培训及课程建设服务。
2、谱麦负责“谱麦机器人测控” 技术推广、对外业务承接运营及核心技术人员、对外合作团队管理。
3、校企共建“机器人测控”实训基地,谱麦赞助部分核心实训设备。
4、学校投资,谱麦承接专业软实力建设,课程开发、资源开发、师资培养、授课服务等。
●双创业务
1、To个人:承接个人机器人测量、校准、并出具权威的检测报告( GB/T 12642)服务。
2、To企业:承接区域内企业级工业机器人的校准、测量、运维和权威的检测报告( GB/T 12642)服务。
3、To学校:承接课程建设、兼职授课、现代学徒制实施(优先安排就业)。
●院校收益
1、引企入校:真实生产型实习实训基地,业务方向直接与课程方向挂钩,现代学徒制落地。
2、实训盘活:实训设备盘活、实训内容盘活、实训支持盘活、与谱麦共建减少投资压力。
3、师资储备:丰富的人才储备,对专业师资力量进行有益补充。
4、课程素材:源源不断的真实业务素材、联合开发精品课程。
5、就业出口:谱麦及忆恒解决部分就业,同时成为人才推荐窗口。
6、创业支持:通过品牌授权、业务培训、创业基金解决优秀毕业生创业孵化。
7、其他专业:对机电一体化、工业机器人、机械装备制造技术等专业整体带动,学校可引入相关业务服务。
机器人测控技术对应专业
中职
|
分类 |
专业代码 |
专业名称 |
|---|---|---|
|
6601机械设计制造类 |
660109 |
工业产品质量检测技术 |
|
6602机电设备类 |
660201 |
智能设备运行与维护 |
|
6603自动化类 |
660303 |
工业机器人技术应用 |
|
660307 |
计量测试与应用技术 |
高职
| 分类 |
专业代码 |
专业名称 |
|---|---|---|
|
4601机械设计制造类 |
460118 |
机械装备制造技术 |
|
460119 |
工业产品质量检测技术 |
|
|
4602机电设备类 |
460201 |
智能制造装备技术 |
|
4603自动化类 |
460305 |
工业机器人技术 |
|
460301 |
机电一体化技术 |
|
|
460311 |
计量测试与应用技术 |
应用型本科
| 分类 |
专业代码 |
专业名称 |
|---|---|---|
|
2601机械设计制造类 |
260101 |
机械设计制造及自动化 |
|
260102 |
智能制造工程技术 |
|
|
260105 |
工业工程技术 |
|
|
2603自动化类 |
260301 |
机械电子工程技术 |
|
260302 |
电气工程及自动化 |
|
|
260303 |
智能控制技术 |
|
|
260304 |
机器人技术 |
|
|
260306 |
现代测控工程技术 |
机器人测控技术师资培训
中职、技师(初级:28学时)
| 日 期 |
时间 |
课时 |
课 程 |
|---|---|---|---|
|
第1天 |
上午 |
2 |
开班仪式、机器人测控行业发展现状与前景 |
|
下午 |
1 |
工业机器人测控技术专业建设方案介绍 |
|
|
1 |
工业机器人概述及工作原理 |
||
|
第2天 |
上午 |
2 |
工业机器人标准及性能指标 |
|
下午 |
2 |
工业机器人测控技术及形位公差概述 |
|
|
第3天 |
上午 |
1 |
工业机器人互换性与技术测量 |
|
1 |
工业机器人性能测量技术 |
||
|
下午 |
2 |
工业机器人性能测量技术 |
|
|
第4天 |
实操课程 |
测量设备与形位公差检测技术 |
|
|
上午 |
1 |
测量设备简介及使用规范 |
|
|
1 |
形位公差检测技术概念 |
||
|
下午 |
2 |
形位公差检测技术应用 |
|
|
第5天 |
实操课程 |
工业机器人性能测量技术1 |
|
|
上午 |
1 |
坐标转换的概念及应用 |
|
|
2 |
位姿、多方向位姿、距离项目的测试 |
||
|
下午 |
|||
|
1 |
稳定性、位姿特性漂移项目的测试 |
||
|
第6天 |
实操课程 |
工业机器人性能测量技术2 |
|
|
上午 |
2 |
轨迹、重复定向轨迹、速度特性项目的测试 |
|
|
下午 |
0.5 |
拐角偏差、最小定位时间项目的测试 |
|
|
0.5 |
摆动偏差、静态柔顺性项目的测试 |
||
|
1 |
自由熟悉设备,总结会 |
||
|
第7天 |
上午 |
2 |
分组理论考试 |
|
下午 |
2 |
分组实操考试 |
|
高职(中级:36学时)
|
日 期 |
时间 |
课时 |
课 程 |
|---|---|---|---|
|
第1天 |
上午 |
2 |
开班仪式、机器人测控行业发展现状与前景 |
|
下午 |
1 |
工业机器人测控技术专业建设方案介绍 |
|
|
1 |
工业机器人概述及工作原理 |
||
|
第2天 |
上午 |
2 |
工业机器人标准及性能指标 |
|
下午 |
2 |
工业机器人测控技术及形位公差概述 |
|
|
第3天 |
上午 |
2 |
工业机器人互换性与技术测量 |
|
下午 |
2 |
工业机器人性能测量技术 |
|
|
第4天 |
上午 |
2 |
工业机器人性能测量技术 |
|
下午 |
2 |
工业机器人性能标定技术 |
|
|
第5天 |
实操课程 |
测量设备与形位公差检测技术 |
|
|
上午 |
1 |
测量设备简介及使用规范 |
|
|
1 |
形位公差检测技术概念 |
||
|
下午 |
2 |
形位公差检测技术应用 |
|
|
第6天 |
实操课程 |
工业机器人性能测量技术1 |
|
|
上午 |
1 |
坐标转换的概念及应用 |
|
|
2 |
位姿、多方向位姿、距离项目的测试 |
||
|
下午 |
|||
|
1 |
稳定性、位姿特性漂移项目的测试 |
||
|
第7天 |
实操课程 |
工业机器人性能测量技术2 |
|
|
上午 |
2 |
轨迹、重复定向轨迹、速度特性项目的测试 |
|
|
下午 |
1 |
拐角偏差、最小定位时间项目的测试 |
|
|
1 |
摆动偏差、静态柔顺性项目的测试 |
||
|
第8天 |
实操课程 |
工业机器人标定技术 |
|
|
上午 |
1 |
通用六轴工业机器人标定 |
|
|
1 |
工业四轴scara、码垛机器人标定 |
||
|
下午 |
0.5 |
六轴、七轴协作机器人标定 |
|
|
0.5 |
刚度校准技术 |
||
|
1 |
自由熟悉设备,总结会 |
||
|
第9天 |
上午 |
2 |
分组理论考试 |
|
下午 |
2 |
分组实操考试 |
|
应用型本科:
| 日 期 |
时间 |
课时 |
课 程 |
|---|---|---|---|
|
第1天 |
上午 |
2 |
开班仪式、机器人测控行业发展现状与前景 |
|
下午 |
1 |
工业机器人测控技术专业建设方案介绍 |
|
|
1 |
工业机器人概述及工作原理 |
||
|
第2天 |
上午 |
2 |
工业机器人标准及性能指标 |
|
下午 |
2 |
工业机器人测控技术及形位公差概述 |
|
|
第3天 |
全天 |
4 |
工业机器人性能测量技术 |
|
第4天 |
上午 |
2 |
工业机器人性能标定技术 |
|
下午 |
2 |
工业机器人振动试验测量 |
|
|
第5天 |
实操课程 |
测量设备与形位公差检测技术 |
|
|
上午 |
1 |
测量设备简介及使用规范 |
|
|
1 |
形位公差检测技术概念 |
||
|
下午 |
2 |
形位公差检测技术应用 |
|
|
第6天 |
实操课程 |
工业机器人性能测量技术1 |
|
|
上午 |
1 |
坐标转换的概念及应用 |
|
|
2 |
位姿、多方向位姿、距离项目的测试 |
||
|
下午 |
|||
|
1 |
稳定性、位姿特性漂移项目的测试 |
||
|
第7天 |
实操课程 |
工业机器人性能测量技术2 |
|
|
上午 |
2 |
轨迹、重复定向轨迹、速度特性项目的测试 |
|
|
下午 |
1 |
拐角偏差、最小定位时间项目的测试 |
|
|
1 |
摆动偏差、静态柔顺性项目的测试 |
||
|
第8天 |
实操课程 |
工业机器人标定技术 |
|
|
上午 |
1.5 |
通用六轴工业机器人标定 |
|
|
1 |
工业四轴scara、码垛机器人标定 |
||
|
下午 |
|||
|
1 |
六轴、七轴协作机器人标定 |
||
|
0.5 |
刚度校准技术 |
||
|
第9天 |
实操课程 |
工业机器人振动试验技术 |
|
|
上午 |
1 |
工业机器人抖动测量技术 |
|
|
1 |
加速度传感器校准试验 |
||
|
下午 |
1 |
地震模拟及建筑结构地震响应谱测试 |
|
|
1 |
自由熟悉设备,总结会 |
||
|
第10天 |
上午 |
2 |
分组理论考试 |
|
下午 |
2 |
分组实操考试 |
|
机器人测控技术人才需求
本技术需求主要集中在工业机器人设备维修、工业机器人精度调试、测控设备的应用开发与系统集成等岗位,主要分为运维员与质量检测员两条人才培养方向。
|
岗位 |
技能要求 |
人才适用企业 |
|---|---|---|
|
机器人测控操作员/师 |
工业机器人测控设备的操作、应用与编程 |
机器人应用及设计企业 |
|
机器人质量检测员/师 |
工业机器人精度测量与检测 |
机器人应用/制造企业 |
|
机器人维修师 |
机械、电气、控制的安装、检测与维修 |
机器人应用/机器人制造企业 |
|
机器人操作员 |
自动化生产线应用、工作站装调、工作站设计与改造 |
机器人应用企业/机器人集成厂商 |
|
机器人装配调试员 |
机器人测试安装、电气调试、装配(本体装配) |
机器人应用/制造企业 |
|
机器人销售服务 |
产品集成解决方案,售前技术销售方案、售后产品调试安装交付等 |
机器人制造企业/机器人集成厂商 |
|
生产线巡检和维护员 |
对生产线上的工业机器人进行定期巡检和维护工作等 |
机器人集成厂商/高端制造业工厂 |
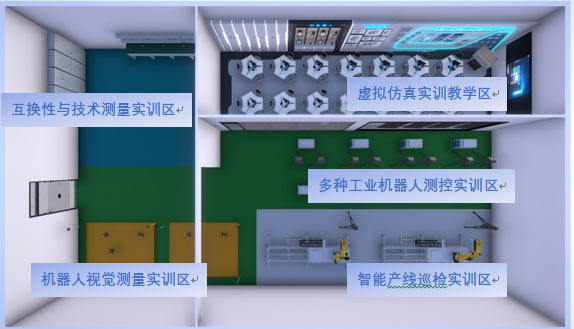
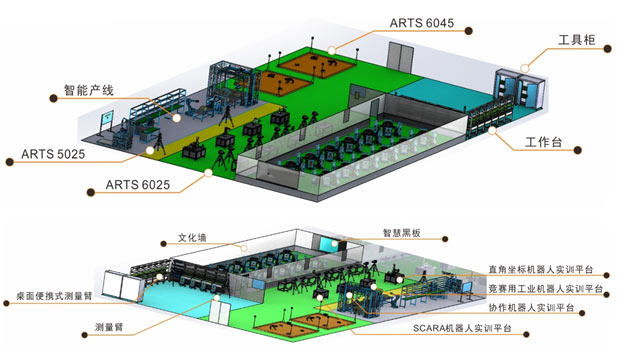
机器人测控技术实训室建设
|
主要 |
工业机器人实训 |
直角坐标机器人实训平台 |
|
竞赛用工业机器人实训平台 |
||
|
协作机器人实训平台 |
||
|
SCARA机器人实训平台 |
||
|
搬运、码垛机器人智能产线 |
||
|
拆装机器人实训平台 |
||
|
机器人测控 |
ARTS-5025 |
|
|
ARTS-6025 |
||
|
ARTS-6045 |
||
|
接触式标准化测量臂(带三脚架版) |
||
|
非接触式标准化测量臂(带工作台) |
||
|
特种机器人 |
人形服务机器人 |
|
|
无人机 |
||
|
扫地机器人 |
||
|
机器狗 |
机器人测控技术使用教材
互换性与技术测量
(2学时)
形位公差
(2学时)

工业机器人性能测试
(4学时)
教学资源
PREMAX针对工业机器人测控技术开发课程资源包、虚拟仿真软件,让院校更好、更快、更便捷的进行一系列教学、实训活动;同时,协助院校开展MOOC录制,打造精品课程。

就业服务
提供相应的就业服务
- 为应届毕业生提供岗前培训和就业指导
- 为合作院校应届毕业生提供与专业相关的行业企业信息资料
- 为合作院校应届毕业生提供就业推荐,推荐到与谱麦科技合作的多所用人单位
- 杭州忆恒科技有限公司、浙江谱麦科技有限公司优先录用合作院校毕业生

标准支撑
《高等职业学校工业机器人技术专业实训教学条件建设标准》起草单位。
《高等职业院校人工智能技术应用专业实训教学条件建设标准》起草单位
