ARTS-6045
产品概述
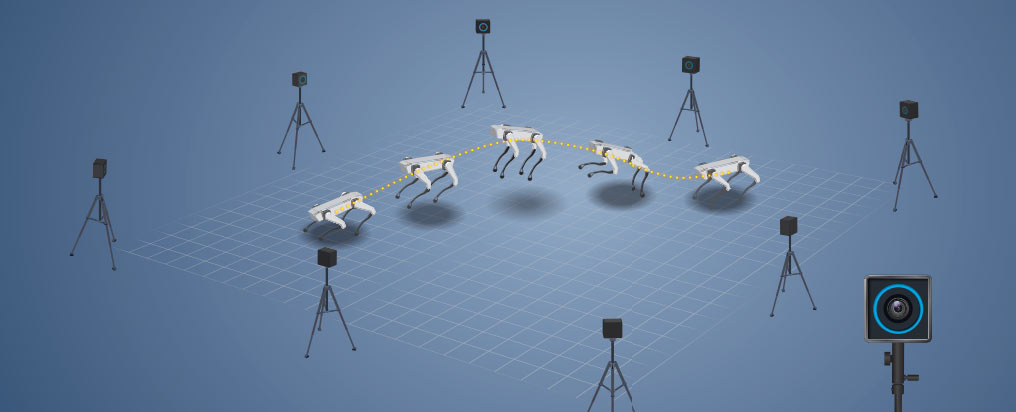
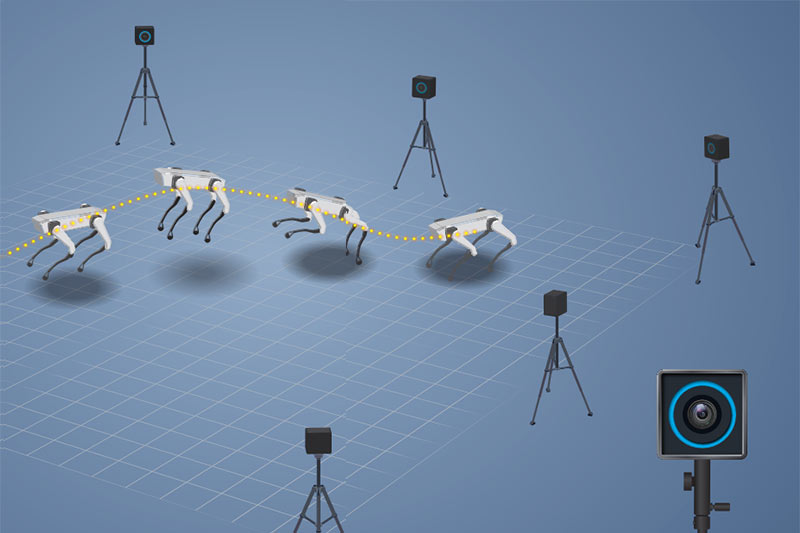
服务机器人性能检测系统
系统全面支持《GB/T 38124-2019 服务机器人性能测试方法》,采用三维红外运动捕捉技术与同步高速数据传输技术,研制了新型 六维位姿靶标及高精度、多目标位姿追踪算法,创新设计了服务机器人性 能检测与分析软件,实现了对服务机器人的运动轨迹与姿态、工作空间覆盖 率等的实时检测。
ARTS - 6045 服务机器人性能检测系统被认定为2021年度浙江省高端装备制造业重点领域首台(套)产品。
● 大空间:可实现20㎡-160㎡范围内的高精度实时跟踪。
● 高精度:专业的高精度视觉追踪系统,检测精度可以达到位置分辨率≤0.5mm,角度分辨率≤0.1°。
● 多目标:可进行刚体建模,同时跟踪5个以上刚体。
● 广覆盖:支持多种类型服务机器人,如智能服务机器人、巡检机器人、核工业机器人、安防援救机器人、爬行机器人、扫地机器人、无人营业厅机器人、门岗机器人、景区机器人、物流机器人、工业AGV、无人机(车)等的性能测量。
● 位置精度:± 1mm;
● 位置分辨率:≤0.5mm;
● 角度精度:+/- 0.5°;
● 角度分辨率:≤0.1°;
● 采样率:≥100Hz。
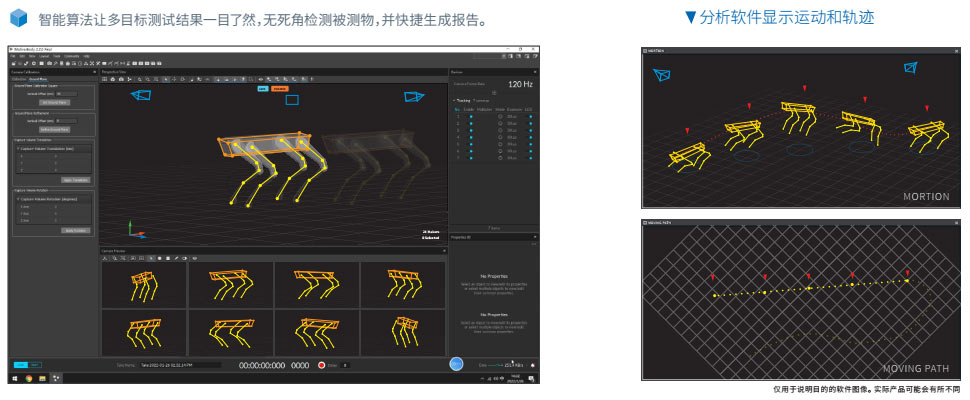
运动位置和姿态实时跟踪;实时在线性能测试被测物位置、姿态、运动参数,同步计算和显示;大范围内多目标高精度测量;多刚体建模跟踪。
系统组成: 高精度红外视觉追踪系统;数据分析处理服务器;终端检测分析系统软件;六维位姿测量靶标工具。