高校研究机构
谱麦科技丨仿生蜘蛛机器人吸附力测试方法
生物吸附是自然界中一种典型的运动模式,许多生物在进化中演变出各种各样的吸附系统,吸附系统是功能系统,其目的是让生物暂时或永久地附着在基体或另一个生物体上,防止脱落。
一种仿生蜘蛛机器人,具有优越的机械结构和智能的运动算法,与现有机器人相当的尺寸大小、动力总成的情况下能更好地适应更为复杂的运动环境,该机器人具有卓越的运动性能,可以搭载设备仪器,代替人工在高危区域作业,也可以在野外等复杂环境下进行军事或民用运输工作。
为了保证仿生蜘蛛机器人稳定、快速的完成任务,对于其吸附力有一定的要求,通过专业的检测设备,可对其吸附力和摩擦力进行检测。
.gif)
采用力学环境振动试验方法来测试仿生蜘蛛机器人的吸附力。
试验条件:
按照真实壁面结构组建,壁面垂直固定在测试台面上。
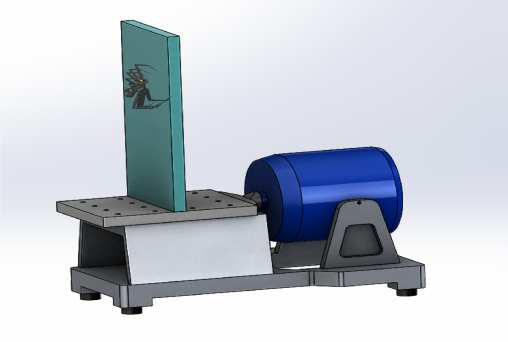
试验设备:
(1)振动控制器;
(2)功率放大器;
(3)振动试验台;
(4)多足仿生机器人;
(5)笔记本电脑;
(6)三向加速度传感器;
(7)其他相关夹具;
试验流程:
1、将仿生机器人固定在试验壁面上,试验壁面固定在试验平台上;
2、将三向加速度传感器固定在仿生机器人上面;
3、在正弦、随机、冲击等振动作用下,测试仿生机器人跌落瞬间瞬时加速度,计算机器人最大的吸附力。
4、调整振动台至垂直方向,如下图所示:
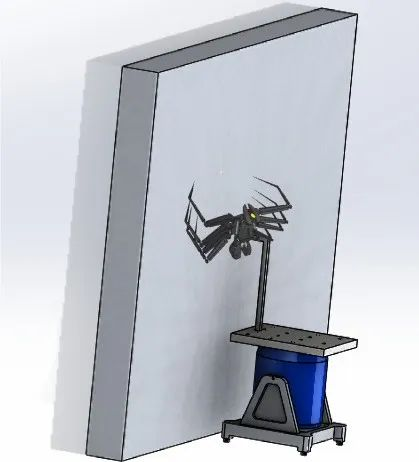
5、调整振动台参数,测试机器人摩擦力。